4 way traffic lights controling.
Project:
4 way traffic lights controling by using 8051.
discription:
there is a reason of doing this project that is one day when i was going from khuwait hostal to international islamic university islamabad (iiui) H10 campuss.
when i reached near centoras plaza i saw that red light was on. This was the signal that we should wait there for a while. Time was passing. then .passing......
...... passing....... At last there was some cars of president. of pakistan. Due to this reason we were waiting for long time.When they gone then after some time when
the green light was on then we move on word.
due to this reason i decide to make a project to solve this problem.
equipment:
1) 8051 controller.
2) 7 segment display.
3) led / strip of traffic lights.
4) resister (10k)
5) pcb sheet
6) iron
8) solder
9) pcb print sheet
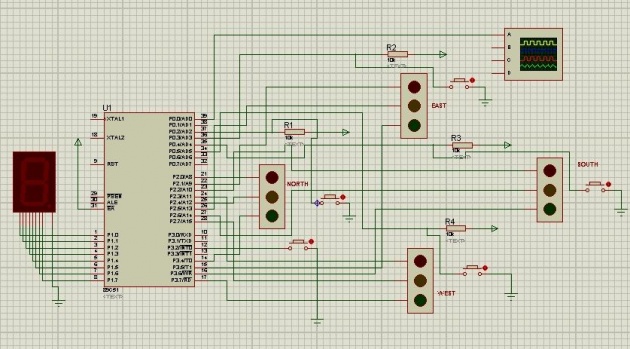
In this project i used some push buttons and one button is used for interrupt that handle the side of roads.
one 7 segment is used to display the time which is 9 second for green led and 3 second for yellow led.
code:
#include<at89x51.h>
char a[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
int i,j,k,l;
char b,c;
void delay()
{
TMOD=0X10;
TL1=0XFF;
TH1=0XA5;
TR1=1;
while(TF1==0);
TR1=0;
TF1=0;
}
void delay1()
{
TMOD=0X01;
TL0=0XFF;
TH0=0XA5;
TR0=1;
while(TF0==0);
TR0=0;
TF0=0;
}
void display(char x)
{
for(j=x;j>=0;j--)
{P0_0=~P0_0;
for(i=0;i<=42;i++)
{ P2=b;
P3=c;
delay();
P1=a[j]; }
}
}
void display1(char m)
{
for(k=m;k>=0;k--)
{P0_0=~P0_0;
for(l=0;l<=42;l++)
{ delay1();
P1=a[k]; }
}
}
void green() interrupt 0
{
// FOR NORTH GREEN SIGNAL
if(P0_2==0 & P0_3==1 & P0_4==1 & P0_5==1)
{
P2=0x0E;
P3=0x1F;
display1(9);
}
// FOR EAST GREEN SIGNAL
if(P0_2==1 & P0_3==0 & P0_4==1 & P0_5==1)
{
P2=0x0D;
P3=0x2F;
display1(9);
}
// FOR SOUTH GREEN SIGNAL
if(P0_2==1 & P0_3==1 & P0_4==0 & P0_5==1)
{
P2=0x0B;
P3=0x4F;
display1(9);
}
// FOR WEST GREEN SIGNAL
if(P0_2==1 & P0_3==1 & P0_4==1 & P0_5==0)
{
P2=0x07;
P3=0x8F;
display1(9);
}
}
void main()
{ EX0=1;
EA=1;
IT0=1;
while(1)
{ // FOR NORTH GREEN SIGNAL
b=P2=0x0E;
c=P3=0x1F;
display(9);
// FOR EAST YELLOW SIGNAL
b=P2=0x2D;
c=P3=0x0F;
display(2);
// FOR EAST GREEN SIGNAL
b=P2=0x0D;
c=P3=0x2F;
display(9);
// FOR SOUTH YELLOW SIGNAL
b=P2=0x4B;
c=P3=0x0F;
display(2);
// FOR SOUTH GREEN SIGNAL
b=P2=0x0B;
c=P3=0x4F;
display(9);
// FOR WEST YELLOW SIGNAL
b=P2=0x87;
c=P3=0x0F;
display(2);
// FOR WEST GREEN SIGNAL
b=P2=0x07;
c=P3=0x8F;
display(9);
// FOR NORTH YELLOW SIGNAL
b=P2=0x1E;
c=P3=0x0F;
display(2);
}
}