INTELLIGENT CAR TOWER PARKING SYSTEM(my final year proect)

CAR PARKING SYSTEM In this Intelligent Car Tower Project I made three floors for automatic parking using lift system. Lift system……

CAR PARKING SYSTEM In this Intelligent Car Tower Project I made three floors for automatic parking using lift system. Lift system……
The Objective of this Tutorial is : Model 1st and 2nd order dynamic system in matlab and plot there response. Question # 1 ……
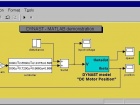
Objective To control the position of motor by calculating its transfer function and construct its control system. Analysis ……

1: Title: Pitch control of aircraft through Simulink model. 2:……
1. Open-loop systems are simple and inexpensive are more accurate and less sensitive to noise, disturbances can……
The statement “A system need not be physical” isa. True because systems can be either physical or non-physical.b.……

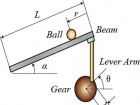
Today we will do the final designing of our ball and beam system. Designing of PID controller: We design PID using Ziegler Nichols……

Today i am going to write about one of the project that i did in control system subject. I present the first part of it and……
Question No : 1 Solution: First write make new file and save it with the name question_1. function dxdt = question_1( t,x )……
OBJECTIVES:The objective of this project is to learn the important role of mathematical models of physical system of cruice control……

State space model: State space model of this system is defined as we consider two state variables ball position ‘r’ and……

Control System and Its Importance In the Universe when we……

