- Objective
To control the position of motor by calculating its transfer function and construct its control system.
- Analysis
I calculate the equation for this system and find its transfer function through which I design its controller(PID) and by changing its parameters (Kp,Kd,Ki) observe its response and check that for which values of parameters system gave exact output
- Procedure
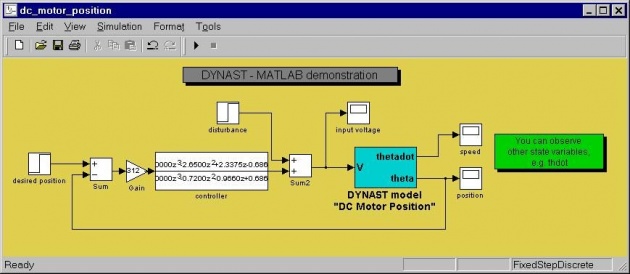
- Modeling:
- give values to the parameters
- Write equations for the system
- Find transfer function from equation
- Also find matrix form in state space
- For conformation just run the code for above equations in Mat lab
- Analysis:
- For open and close loop systems plot step response and their stability
- PID controller:
- Proportional controller:
Check response of this controller for its different gains and get ignorable steady state error.
- integrator controller:
Check response of this controller for its different gains and get ignorable rising time error
- Differentiator controller:
Check response of this controller for its different gains and get overshoot error.
- Results
- Modeling:
J = 3.2284E-6;
b = 3.5077E-6;
K = 0.0274;
R = 4;
L = 2.75E-6;
- . Transfer Function
P_motor = K/(s*((J*s+b)*(L*s+R)+K^2))
0.0274
-------------------------------------------
8.878e-12 s^3 + 1.291e-05 s^2 + 0.0007648 s
- State-Space
motor_ss = ss(A,B,C,D)
motor_ss =
a = x1 x2 x3
x1 0 1 0
x2 0 -1.087 8487
x3 0 -9964 -1.455e+06
b = u1
x1 0
x2 0
x3 3.636e+05
c = x1 x2 x3
y1 1 0 0
d = u1
y1 0
- Analysis:
- Open loop system:
command step to analyze the open-loop step response.
t = 0:0.001:0.2;
step(P_motor,t)

After this fig.we see that the output is approaches to infinity hence system get unstable
Command to check the stability of system
isstable(P_motor)
ans = 0
For stability we also check the poles of system
pole(P_motor)
so due to unstability of system and to make system stable we use close loop system (feed back system)
- Close loop system:
After giving step response to feedback system we see that system approximately get stable
img src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAi8AAAEgCAYAAAB8apMMAAAgAElEQVR4AexdB3gU5db+kkAg9N5L6L0LKiAgdkRREQuIogJesfcfUUHkWrCLXLiAKOAFRREBqQpSFAXBgtIFpPeWkIQSyP++Z/bbTDYbEjQhW855nt2d+earZ2Zn3jk1IgVklJQDygHlgHJAOaAcUA4ECQcig2SeOk3lgHJAOaAcUA4oB5QDwgEFL3ohKAeUA8oB5YByQDkQVBxQ8BJUp0snqxxQDigHlAPKAeWAghe9BpQDygHlgHJAOaAcCCoOKHgJqtOlk1UOKAeUA8oB5YByQMGLXgPKAeWAckA5oBxQDgQVBxS8BNXp0skqB5QDygHlgHJAOaDgRa8B5YByQDmgHFAOKAeCigMKXoLqdOlklQPKAeWAckA5oBxQ8KLXgHJAOaAcUA4oB5QDQcUBBS9Bdbp0ssoB5YByQDmgHFAOKHjRa0A5oBxQDigHlAPKgaDigIKXoDpdOlnlgHJAOaAcUA4oBxS86DWgHFAOKAeUA8oB5UBQcUDBS1CdLp2sckA5oBxQDigHlAMKXvQaUA4oB5QDygHlgHIgqDig4CWoTpdOVjmgHFAOKAeUA8oBBS96DSgHlAPKAeWAckA5EFQcUPASVKdLJ6scUA4oB5QDygHlgIIXvQaUA8oB5YByQDmgHAgqDih4CarTpZNVDigHlAPKAeWAckDBi14DygHlgHJAOaAcUA4EFQcUvATV6dLJKgeUA8oB5YByQDmQR1mgHFAOhDcHNm/ebObPn+9lQuvWrU2DBg1kf/Xq1ebUqVOmadOm3uPnurF+/XqzcuVKk5CQ4G3avn17U7t2be++bigHlAPKgXPhQEQK6FwaaF3lgHIgdDgwbtw48/333xsClhMnTpjjx4+b33//3TRr1szcc8895r777jNHjx41X3zxhYmKijJ79uyRxZcqVcrkyZPHJCcnCyhJSkqS8tKlS0s9N4f69etnli9fbnr27OktJqDhmHfccYeUsZ8DBw7IdpkyZUxkpCMU9ldOMEUgxLmSypYtayIiImSbxw4ePJim3Ld+uXLl5Di/Tp48aQ4dOiT7WSn3NtQN5YByIFc5oJKXXGW/Dq4cyF0OEJjw4V6xYkUBLAQln332mTzQf/rpJ7NixQoBBqNGjTL58+c3v/32m0y4UqVKpkuXLmbWrFlm4sSJpm7dulJer149c+ONN5o6dep4F3b69Glz1VVXmUceecRb1rt3bzNz5kwBL2vWrDFz5swx27Ztk+NVq1Y1119/vWG76dOnmx07dgiwKl++vLnlllvMl19+aWbMmGFq1qwp9Rs1aiTlBF+ffvqp2bhxo5Q3adLE3HzzzebDDz80X3/9talRo4aUU4rE8mPHjkn/u3fvFiBUuXJlc+utt8q406ZNM7t27ZL6HOfqq6/2jieF+qUcUA7kKgcUvOQq+3Vw5UDucuDhhx82v/zyi4CHRYsWmfj4eBMdHW0uv/xy065dO9OpUycTExMjD/d33nnHdO7cWSb8ySefGAptWZ/gYcyYMVJOSc3QoUPNBx984F1YsWLFzFdffSVgwRaWLFnSK4kZPny44dgEOKSPPvpI5hAXFycSH86DQImSliNHjpgtW7aYiy66yLz55ptSv0ePHgLACDY4d0qTSAQiBGaU6LRt29a8+uqrUt6tWzcp59wXLFggfbHs8OHDhmOOGDFCeELVFonzowTo0UcflX39Ug4oB3KfAwpecv8c6AyUA7nGgYEDB5ozZ86Yl156SeZAdc5TTz1l+EswwYd23rx55WFPyQXBCemSSy4xFSpUMJ9//rkpVKiQlPGL6h6qYtxElRLbEkxYmjRpktjBECAQRFBiY/umOql69erST/369eXYjz/+KKCkT58+Mp57TKqMOE8ClQIFCtghRGJk52/VUDxIdRfnyPURBNWqVct89913ZsKECQJQeIzSGTufVq1aeaU23s51QzmgHMhVDih4yVX26+DKgdzlAB/es2fPNv379xeQQqBCwEAAQSIYoHqHqqCLL75Y1DIsJyDhw79w4cIiHWF7UsGCBUXlIzueL0pMqGayfbJ47NixZu3atVKDqiCCB6p8SImJiYb2JwQRy5YtM6tWrRK1EQEOVUeUrsydO9cLklj3iiuuEMmOXQv74ZiUII0ePVrasIxkzfw4Du19fv75Z+m/YcOGYj9z++23iyTIzofzJ1BTUg4oBwKHA2qwGzjnQmeiHMgVDtDAld5AlqgGIkgg7d+/X2xIKJ0gaCCYINk6ffv2FSnNgAEDpJx2JjSgdRNtVkgEE5a2b98ukhFbRkNgghQSjYVp+EuiKuiPP/6Qus2bNzdUN3Xv3l2MiK0NTYsWLaSc9Xfu3GnoIUVq2bKlKV68uKiZaK9j17R161YBagQktLNZt26dSIxYv2jRotLWlnOHkheqvpSUA8qBwOGAgpfAORc6E+VA0HGAxrP0QrruuuvO29wnT54soITSFiXlgHIgPDmg4MXPeadR4NnetOgFQeM+6s7PVs9P11qkHFAOKAeUA8oB5cA/5IBG2PUwkHEj5s2bJ26f7777rlcv7o+/9F6gyPq9997zd1jLlAPKAeWAckA5oBzIQQ4oePEwl6JvGh/S4JBeCxkR9eNLliyR+BT0ZFBSDigHlAPKAeWAcuD8ckC9jTz8pkEfvSlooEjvA3ok2KidrMKAVgzaRQ8FBtCy+76ni14YNDzkr7u9b73c3idYo2eJjVKa2/PJaHyq5vgJ9HmSl3THZaC0QCYa3fK6DPR5koecK8nX9VoKA+grX7584m5+tpeeQJgu73F84Qr0ly7Ok7ykej6QifGPeG0G+jz5LONLeePGjQ2v1VAhlbz4nEmCDn9EOxgaJzImBWNbMEgXgQ4jfbqJXhOMFxHoxEBfXEOgE91pye9AJ3rr+F4LgThnugbTzTgYiPmWFi9eHPBTpSs5IxEHOjHFAz23Ap14X9q0aVOgT9N8/PHH4t0W6BNlHCcGbrRpMwJ9vlmdn0pefDjFE03piiXawjDcOFHr4MGDRaLCY3S3ZDmlNW5ie+Zm6dChg7s44LY3bNhg6K5qo4gG3AQ9E2IwMoawD/R58rxTQhTo82QEWebyCfR58vTT7Zlv4YE+Vwb0YxC+QJ8nIykz+N6FF14YqH93mdfSpUvFPZ1xfQKZGBWasYuYViLQiXO18Y0Cfa5ZnZ+CFx9OMbcLI4FalQ9FggQwVAkwBoSNA1GkSBF5WLG+m9iOD7JAJ4o7qToKdKL42J6LQJ4rRfHBMM9guDbteebNNlhuuIGuiiFPeX0GumqL8+R9KdBVhXaewaB+5bUZLP8j8jWrpK7SWeVUFutt3rzZjB8/3gwaNCiLLXKnGm8OVJFZMJY7s8h8VN4c+CFYDGQiL3mToNF3IBOligQw7vD6gTpfvjTwgesO+R+Ic6UqmVI32kAEMlHqRjsiSrMCmShpJS+tzVOgzpWmBLQlob1bIBPvS9QaMN0FE7CGCqnkJVTO5DmugzeGQL85cEk0MAsGI7NAf3DZyyPQgYCdJ3/5YAgGCnTAankY6C8Adp6B/kJl56kxviwncudXDXZzh+86qnJAOaAcUA4oB5QDf5MDCl7+JuO0mXJAOaAcUA4oB5QDucMBVRvlDt/DblTaWdB25fTplLBbe7AvODIyAirGvGLXEexr0fkrB5QDocEBBS+hcR4DfhVxcfFwL99sSpSg4a0CmIA/Yd4JRpi4uGMwmC4Jl9DUrNDew7qhHFAOKAdygQMKXnKB6eE45OnTZ+DlkBcPwDJYfuC7kofjOfK/5ijEW0mBi21gRzv1P3ctVQ4oB0KVAwpeQvXMBti64PHqIQIXBS+WG4H/G5EuVUbgz1lnqBxQDoQ6BxS8hPoZDuj1UX3E/DWFXLNkUsx4fLxox3XsbJvsi/ErGHPh77Q/W9+5dYxrYuwQBhM8hs+58gRNlJQDygHlQAhyQMFLCJ7U4FgSH8xFEPp/p5k8eQy2+WBOMbVq1URqhc7YPoIPneHc6grusx4lN/bS5Tbr5Dfbtm1CyoOdpk2b9thngkTfOmxvowpbCRDr2D6wKWTHcY/NA77tedxfXVvmb54yQAZfvv1HmrVrVyGf1jGES2dI94yznWfQoRYrB5QDyoGQ5ADvlkrKgVzgQCGzaNEC89BDzyBCZVGJpJqYGGGmT59lnnvuWWSRZibvOMyLEWsJdJgNNcVTlsfs2bNdPomJlLIURv1IJMT81DzwwFOIHMz67jqUWhSEp9MpAIHD0u74ceavcuokJfE4pT9sF4ncVsfM4cMHZRtfIJY7UUntuMePJ6CsEFJHxEv91Pb5oWY5jTnweKR3ns54dgwcSkPsnxKWFG/9EyeYILQQEqpNRHTM12UbX0rKAeWAckA5AA7YV1NlhnLgPHOAICEBnizxCFld3lSt2tjUrt0CWW+XItv152b16jWSCbVXr3tM8+aNzK5dB8zUqZ/CeHSPadSonlm2bBXC8Z+GEbAx1113M8LdR5uZM+ch6eBh8+67Q021alXMDz/8ijVFwMOpoLn++q5mx46NZsCAIUhO18zUqRMr3jPffPOdqVSpjOnW7XaU10H9fOb77+ebVavWmCeeeBr7BCHR5q+/dpg5c2aYdev+gvFqMsbLgz5vBhg6JFma77mnL+ZVGx5Vu5AFexJA1jFTvXqsWblyjdQvXDgv6ndDIrdm6O8kPm7Ki/63m2nTPjc//7wGByJN2bLFzC239DDFihVFpNkC7sq6rRxQDigHwp4DKnkJ+0sgtxgQZ6655lozfPjrZsWKn83//jfZPPLIw+bDDycCxNQ2LVq0FpBy5529MMECAAgzAAqmmcsua2f69x+M5G15TbNmjQE6ugPQ/In6bcy9994BcNDKNGhQWyQ6UVF5JMnbd9/9YIYNewcqqjhTsmQJgKIJyEFUyIwZM162y5QpJWM7Up4Ec8UVlwG4PIxxCVxIhcw338wyb7zxvox74YUtTefONwFQbTZXX32DKV26pOnXrx/qFTSffjrBLF26DHOob1566Q2p37r1hVhrF0hVNqOOv79cYax7tFmwYInMZ9y40ea2226EVOcYJFL+6nNOSsoB5YByIHw5oJKX8D33ubzyYuazzz6EvcsM/H6JuZwx69dvMB9/PAZJLV8xd975L4CYugiMFmXuuecuc8EFjQAIGkFCUxNqlP7moosuM5s3rwGgeBOSlcKme/c+khiRGWmZzK9UqRJIRNYX/SbBFqYdjkWb3bs3S39cOLOEM/Ca3U7Nn0QVDo2IeYxqK9rYJMHmpLl58cX/My1bdjAbNqwyb775NiQrFQCeegFkNYG0aKp59NEHIM0pB7udOpDsNJT6LVq0g93KL+att94xdevGmptuugP9QSfmQ2mz/UaL1Obw4dNmyZJTSKTIOSkpB5QDygHlgOWAghfLCf09zxw4gYd8I6hsVkKS8gwkFKeRgLEo7FLOmIEDX8BcEk379lcDJBw3l19+I6QWl5tZs742v/76k9m4cTPUMwcErJQvX8o0btxC5s7kiD/99LOpV6+2uf32myEF+UzKk5KOAHS0hi0KTHvRP4kp4i0ocG9TyrN06UIAqU3m7rvvRU3angBuwKZmzZr1AEz7oAY6JfFqmjShEW0S1FbdxBane/fepmfPW5BV/FP0sRgqsLXmzz/3SP0qVcoC5FyA+hw/fcLBG2/shnqTwIv+OB4BldohSJmukoy1KSnOnHFASTmgHFAOKAfAAQUvehnkEgeSYGPS1DRs+CLUJYsxB8fbiFFc69UjKIgzBw/ug53JfICcGub990eg7BjaNMHxyjD2/R4SFgNJzHWQ0BAUxJkbbrgWEo+akLqUMrGxVcz8+QtRbmSbdfbv/xOAqDVK4qCWuQmqnMtlu3v3m821114p21TrVKpUEbY0NKBNxodEycuFpn79qqIS4rg1a94Iu5qmOBZn9u49ArXSQgCkpmbIEBrXxkN91RprizU//viTzLNWrZswjyZQNa0RYMReU+kM1ljXPP98f9T/QYrr1KmFtTWExKmuufXWG1FGKZCSckA5oBxQDpADCl70OshFDiRBjVPMXHllV9cc6H58CJ8CkLasFunI888/CTVKTZQdxuckJDQF0eZ6bJMIMFg/D0LYlzUXXljOU5bsU+cwbFPK41MZxxMBcMrhUyndNgpMlSrV8OF4lLoQVPETByPdoq4+6bbMcYtgnr+JmmrgwGfQrorUpWqoSJHiPvWPQ4W103z11VzUsZQi0pX4+AQY9N7qU/+IqVCB/dHuxc7FtnP/WlUX50kXcf5a4jGqwBwVmcMvGgy7y2xd8pLH3O3tMf1VDigHlAOBwwEFL4FzLsJsJlFQxSTBA+hPc+TIUaydD8wUeNmUgUqmIbYPio3Lm2++j20LaFiHH+5bY1o+nKNEbZOQkID2BC9WzUIXaEtsR8DBBzTBAH+571vO/mw9HrPkf9y4uJ2QwlQzr7020OzbdwCVj8CDKk6SUJYuXRb77jmkwFanDT5X2E49v3FQE9Hlmx+Ob8flL8EEyZY5e84361JCFIPx9opBcpkyZbBv18/jRWD4uxd2N+uxbcSWpkSJWACuDeD9bimLiEiBR1NBU758WVO0aHGU2fZyWL+UA8oB5UDAcUDBS8CdknCZUBF4EH0lXkFdunTBogkYomFEa0y7dh1Nly6dsM+HrwUpjLPChyqBi5Ui2Ad9ARj+jsdnGtRM83CcIIBGtwQo/FgiaPFty/4IDBhHxi11sH1zTJbzOPt0g4kCZuzY4bCz+cU8/vgTAAi/mTvuuA+eQyPhbv0j5kNDZBrnJuJDYh+cA8Ea58ExCprXX39HbHWc+qzLchLnxfmRN/yrct+9nhi4Vi+Demw51FZzoMaqakaO/BB1KKEi5TfLly83M2ZMBUB0jITp4n3llddConXKfPnlF5IpOm/ewubrr+cAVF1gRowYi3a2vXSiX8oB5YByIOA4oOAl4E5J+EyIEhdKLYYNG+5d9JQp4wAEHoMLcic80BcitstsOVajRmXYqdwJQ9315r33/ouyFACdGNjA1INxbm9RLx1nZDsBBwXR7hMYy24xTz31FMqocimI/paY//yHD2enbfPmDdHnHTACXmbeeWckYqoUg61KS3gF1QIomWiaNGlgevXqLeXffDMTbcdAMlEM7Y3Enrnrrvsx7hkxHGZAvYSERPPLLz/CYPcT2NccwLxugxqrMbyQOAcDMPOxzOmxx54EWJiGOc5EaV6MvwJGxw0l7s3ChTMBRr6T+o0b1wWI6ybjT5s2GfYye8z99z+EYwlynGCuQIECIm2i55Szfs8h+SlgJk4cB5ucg2bSpM+l5OmnHwG/3zZffDETBsFXo+wMXNAnA8ScNjfffBv23ZIiaaJfygHlgHIg4Dig4CXgTkn4TIiqCtqAjBgxHIumrUYB7K83//rX/XiAzzCPPdYfrsXdUB4JO5F5iL47F7+zEYQuFoAhCi7LW2Ag+xLixKwC2LkUwKKIOXBgt3n44YegFtmHoHVz0NaROFD60axZE7R9RdquXbvJ/PvfLyEY3VoxtOU83n13BB72Y8yrr76DOX0AEDISsWP6mClTvgQo+U3ULO+8MwJ9GkhXhpunn34U4KSFBJFbu/Z3AIKv4OLdF3O5zGzZshUGvtXN7NnfALw8K21Wr16HOf8JL6iJAC7TASIcEPb++29ICoCpUyeaoUPfNZ060Z4nwowePd4sXPgDxpqAlAltJdidA8SkO3ydANBqiE8rpEXYgMB+6+wB72+BAgUB8lKNfekiXrhwYc/xCPPCCwMgMVojHlIxMbwdUGrlT0Xl7VI3lAPKAeVArnNAwUuunwKdQCoHjsEtuj0kAjfggT0MdiyJABYtcPg4vIgqwGC2NIDKd5C8DIftRj1E5i0OT6OakHLsN+XKlTW//74GEpQ3TceO1wA8rEYMmKHw4BmE9jSsLQRPobnmv/8dB/VKXXgUlYTUpzrC+CeZ4sWLSqC5KlUqS/A6Ru7lNsFQfDxVPLCqQfyYSpXKSzn3ixcvZn777Xcpp6t1dHQ+Q1ftmJiCiDtTXCIHV61aBeqjn1hdiOMwOF5c3GEAKGcMHmCE4bVrN8Bm5YhIclq2vAClCVhjGRmTwKto0fIoY16mI/hQ9UQiyHBAH6UujG/jENVOtIUB1MH6Tp+m6imVaBtEOnHiBHgcL95ZnLujLrJ9SBX9Ug4oB5QDAckBBS8BeVrCYVIReFgfhUdOYahCHnAtmPYdJ/HQri5AhqCAtiIJCbvxewyqkaJQg+yHG3Etib3Ch/Py5b8A2BSSvh5++ClTpkxZSG5mQ4oxFOqZeYiY2wZtI8Tug22rVGFbxlJJhGvyCon9cvw4QYDzsLcP98TEJNShyglQAA/3zZu3QkIxHnsRkBDtMJdccin6PAIAwHmdEMDCusnJyQBKywFKysH4uALaTGAx7FIWyRxr126ItAGrvOXz5n0rYKhKlRoSIdhZc170txXAjFKSGACl78Qgt127Dti3djfY9BDXwgSODuWDpGg5eBYJtdoFZvHihd6xONfWrS+Rai+88H+QJu1EpGHOj6BISTmgHFAOBAcHFLwEx3kKwVkmwDC3jbz1O3YWBC2WUgA4rkSclBqIuPupFDLuCXMJETjUrRsL+5GpAB0JEtelQYN6UKmcRLTbLgAuJVCHAd6uAMApA4PW36QNXZ2vv/4GpBGoDzXQdLQ9hv7r4+HeSMDGHXdQPZUIlc/l8HKqJ9vXXnsFbFEaYBsmswhMx7xJe/fuw94xxIi5AmNcL6CCdeipU6NGLI4lmhtv7CyqpBYtmkKNdJukPsABGMpeKuO1a3cV6laAwewMFpurruooqQ4uueRKxHupDPXYTJRGYK7NRIpEVREB1ZEjVP9YqQtbWkqE7U5XD3ihwW+kACrmjbrrrrvRTz2or+ZJ5R49upmLL2ZMm0QE17tS1lWkCI2hVV0kDNIv5YByICg4EAGRt3VtCIoJB/okN2/eLG/ngwYNCvSpntf58cG/f/9OgI3KGJcePLzs+NCkZIUPZapELPEYVR08VtBTSC8ba7vhLvcclh9bh6oPqzqhVw/b2TKO6S/RIcETH+BUn9g2dpvGtuMlWeOQIW/gOMm3PsfmuwDHsmNQmsNyuwZsyro4Dj2X3POgNIWSE5axPcmWcZvl5JEFGVyPBTLkJ8fgPiUoPGb37Zq4FhLnRLUR61Cqw1/LV2ymoyhIZ/YC7OUDGKyS7qgWKAeUA4HNAUqCBw8ejHQp90EaXDGwJ3sOs1PJi4dZxHB8u6Ya4Ndff8Wb/xUuGwKnUnx8PFxx58ibesmSJfEmzTdYpb/HAT40aUzLB2801DOpaot8+fLDloQPX0oR3CoStiGxzF0uhZ4vW8f2zzHcZXx488Myfji+Jd82bMtPCjI8d8OH4IH2M+7+eNz2RxUTj9kxCKAccJaSkozries8Kh5CTj2ClTOwPUlE4D0Clkhcg0fh+ZOIugQrXL8dy1FfOfsRuAZPmZMnU3kQHX0K7QiILKCxLtcs49+c+5wXiX1Gwr7mKNRdxzEf8prztPPHppJyQDmgHAhgDih48ZwcBhabMmUKQtIfhGpgr4AX93nbvn07Mv6OgzspVRcIoYZ6w4cPNw888IC7mm5nmQN8sBcSg9KPP/4QdhnLsU9pSx64/hYTF+WGDZthn1ICPtitdMAtUeHDmA9eEiUclDLwIcwHP8lKR6wkhGWsFwnX4Q9gTLsMaQfGsBBk29v+raSCfRBk8DglMiXwIdny4kgs+ZHYzjgB9Sy4YT9FoWo6AK+h/wCMRMJQuAq8peZD7VXd9OjRS1RL48ePBVDLCw+pR6TXmTNnw6X7J9O79/2oX84zjq/UpQBSKnxlJkz4FP2mAHwUgz3ORqieGiJY3ntoY4FgNFzLNyMdwS54Xn0phsmDBr2M41Hmgw+GwfV7NFRnTWC4XBleXbdBXVbdMx5+lJQDyoGQ4ECqIX9ILMe7CAUvHlYUKVIE9gl3whBzm4AUSmLcJ51uvRdeeCEePHWlxdatW820adO8jPTdYPwPS+zH3ZctD+/fGCQu/APGoqPhMVQfv/8BOwhG8kPy9TuCrf0HeYg64oFazSxbthJJEu/DMYKTwvAqWi5uwe3atTYffTQRZQZuyXWQ2+g2s27dSrgifwkJxkm0rYtYK3chtsofHhuZ07ApqQ4Jyr3iyUTX5mLFnkPrJHGj7tq1B7ZPIwHjz3CZ/ozdIp5LUzzYb8dWCsZc4Y2XcsEFzWU8Gsa+//5ocY1u06Y96l6HupRgxMBo93vYu4zHOug6vR4gZgLsXGbBRftZZM5+AfmSWkhOpJkz56E+QdpJ2KHcCiD0o8S6mTr1K+lrwYK5Er33tts4P/adAHubdpKnKU+ewjBOXgTboHGwz2mJY1a6gk0Awe3bd5pvv11svvvuR9jbMHJxFIDP1xjjJ/PII48BjHdBnqgFkqG7QYNaOE5QpqQcUA4EKwf47HJbg/h6GwbrunznreDFwxGCizx58kieGV8mcb9EiRIijeEDd+nSpRIr45FHnLdld332cfjwYbj6fiiAhfpGhmy/4YYb3NV0Gw/3ZcuWmCVLfoB78wjwgy7JlJCkACS2xcN+HaQIr0pcl02bPjP9+j0AScEI7E8FsJiEB39zxGB5CKCjFdpEQQoxGQ/h5XCtbgjeTwSgGA4j2gqQikxGBNu34bl0NfIEVYTa5hTqfghpRYy4V1900YVoH4lz+g1sWtbDE+dCSCXGAsj2QbmBdOZrgKyNSJDYDKB2PLJG95byJUvmARCsQAyXRwUQ0e24Ro2aOEYJDSkGEYRnCKgZPvx2s3PnVgClolhHb4xxkSlZsgTWvwJzewNAYj7sSSpivnUhhYlH1OGnEAPmdTNgwNMAOkPheVVB2qb2jRVH5cGnJOY6EgDoa+i0X8U8amNcK/nhHBJN27Yd8LkGiSYNQNxmFqL+LAE80dFFBMi0b98GgFcU7MgAACAASURBVK47jriBj1TVL+WAciCIOEDQQg3CoUOH5HnGqfNFmiYPfDaFEoXWarLhzNiIqb5d0a138eLFcgFQQpM3b148PNxGpk4LgpWiRYua7t35MHCIgcGU0nMgT568JjLS2nRQ3UNVi0NJSYxbEgmAUQGSmRrm7bcJcCIhgdgp0WsbNKhjXnrpDXk486HLbNJ16jSAYWkypGM1TefOnaWjM2cOSdj7ggULwLbkCI4XhDqmLILZ7RIPoc6dKSkxkFCsw0P9W7hR89ghtL/WU77WzJu3APMoBlXhYW/55s2/Axh9CWDxNgBUI3GTbtKEaq5U8OAEiKPNCWO5lIbB3L1IH9AT0qFNkAT9D7FlSkiKhL17j+IGk4S1XAqPqCtRt5JcQwsXLpG2tWs3xi//qgR4ll+U7EWYTZvWi5t2KnBBsdRlPdrE0CYnBuq5415e07aLqQDeeutNHItAsL2HEQzvfoCzT7CvqQHAhIAkqrbpdeZIce11EJBT1UllMwcISqKiIvHSU9Lvc8cOx2uD9z635IXPJIaN4G8okYIXn7NJdEopi6UDBw6YH374AQ+oZpASLJHfyZMni3EvLyR/EhWCFSfol+1Ff9NzIB4uwtfhoZ9onnnmCYA9qmb4oC0AtdCviFOyGqqjkdg/BolXFwCWQ+B9cwCZWPPmm+8hUu1vkGC0hCTkTtRJhtRkOcDFcQCUY+LS7AChEzhPxsTGVoF65E6oRjYgeu6/AVCqwl24hacemoP4UDh+/CTOfWmxRWEAOpITU6a6lFNaY8sZ/r9GDapZMMNjCQARfwEAbUdcl6Iooe0OFDxJiRjf3jC4Nobwj4RkaLRkxm7ZsjmkQBMln9Dw4a+bTz6ZBPByI96S4sQWqFo12qBwDn8JQKlaNRZ7Tt+0pxkx4l1IU/5ClOHXUE6VGh9oUYguvBPGvKdknbY+48AwxgupePFSsq4//9wk+wyYV7JkaWwTECkFKgd2796Dl6dTYruk5ypQz1LOzItgZNu2A4hnVVikxmcbJT/FrC7iC7kDeF2FIbCp4MXnJFaoUAG2AI/gLdWRlhQvXtxceumleKAVxENiiDxUbBN/khd7TH8z48ApSDNKQkXyKNQ9c/AgpmSFkpcIqD+qmpdffgl/1GLYj4OEpKKE3F+yZKmoixo3bgwblxoACuVRb5C0qVu3Box87wWIWSF2HI4K5IQEaWPG5pdfHogouNEASd3MrbfeAXXQAtO1K6UuVJVEoF5jkfRcf30XSESKYT5vo9wgRkoTqG/uleuhbNmS3vKWLZt5oveeNG3aXAQwtQm2JTOhbrobrejZcxIqrDYS2G7OnFmY/1UoOwVj3LmmXr06pm/f+6XP0qWLY24vCBB76aUhqGNEZcT4NMw/xH5WrPjF7N69D0a8tPth36QzUCUVgN1LG9j20JbFSnzyiY3QoUNHYCfUG+XOXC655GLxpGN/zPc0b95XGMdx+7700raw1bkFda1RNDaVAo4DvCcVLcoIzvxfWBAbcNPUCeUIB1LwUkLJ67kTwUsoksZ5yeazqnFe/DM0fZwXW4/SAqpWHPWKU8o/GyUV9gZNUEO1Ej2LaFBKKQPBJcvoAURimyR8uM+++CBm3/xkVg9VoFpx1C00nHXX5xw4FzsHO54t5y/fdNie9TgHjsn69AL6EyDhbUhp6poHH7wPZazPPljP3SfLo5ABehqAxRyol+6G7U9zlBF8sH+ul9vsm8S2vl5Itpz1Wc89F/KOZZS+sC/Wse8udi3+bnIa5wWMCgjauPFPgJco2NCVxHx4zpTChQOUvKxZswMq71qZSl58eUJ1kcZ58eWK7isH/jEH+BCmbQYfrHyY8oHLGzPL+YC1QIR1+LHlBAAEC3wQE3DYhzolKY40BRsg1mc9ftzkW8993N3eDRj89cNxbV/s386Dv0eQn6gK7HVehSqIb01UIRF8cR2W3H3mgWHxxdBZXwopEFWXPEa7KvZPYp/8+AIP1rF8cQMSW05gxW0SQQz7JZ+Vgp8DvP55fvlridcYrxleE+dCrF8EH16fvEbstYzNoCWuiapcXu9cVyisCctQ8r56KSuUA7nEgQgY0UbD2+db2Bb9JN470dG8wRRDaP9F8IpZDDXHC9inISlvRMWRF2gh8hmthM3MFchdtACGsA+h3N68eYPizdtKaSywYVsCIXcMGHsMxUKs4zzop0yZJKqaBx98wnOMP+ybYIZE6Qzrks5WTu+ehbBN2WTuuacPVFdcGyUcBCAEFHYODDwXCc+jlVAXzRBbmTZtWomKKzqa8+KHdfLCQ2iWZLBGAfIrXQRPoR6i054/fyayVc9ksbhR33zz7VI+b950pByYI+UdOrSBuuxWGJzbPqVYv4KSAxGwbaIN1fuwEfvDu4K77roN3nFtPJ6TFsjwuuM5L4QPr1eCXCvt5DXNshJIZjoYavJLoC5t7ymzdXid2v+VlT5SimellPa47zjsl2UkO74F2LZNYRwj2LJ1WY9lBFAc345n69v+cCgN+evfmIEDnxVVcqNGNKhnn0qhwAF7FYXCWnQNQcmBolCVfIIb8HhELO6IHD134sH8pdm1aweCAI5BROP58Ixpj4f0BbK6nTu3S2A5xjaJiSkJu5eKsOXYjYf+MrHpYL4iZov+8stPYTtTEzfhDmhHexBmiN4F757PpB8ea9LkEs8xezPMi1D4exDL5X8w5j2KwHFPos9d4opMsS3bNG3KNqfhDr8dwGqh9FW3bh0Ee2uN7WQYDW8FoPpWyuvXr4vYK23xuVjyGPXt2w9xaSbgWDxEwKvQxxHYy7A/3rSLYF1vwBbne/Pcc0Ok/ccfjwKgexwu4iOxT8lNEfPuu68CuP1knn12sNQZN24EgNFW5IgqCY+hRTBmHi7lb701BMbFa6Cuqg5bnEWw23lRykeNeg+8+hnu6cOwzz6VgpcDRWGrdA2Mzy+Q6yEpaTfAbQEkOu0D+6he+B/UwzVbHjZcsVgi1agl8JIwV+If7dixC5nM14kbLfN5FSlSAa7/i3FdjERogLXIvn4h7Lh+QYDDDWgXYa699kr830rjmvpR3P8Zmblr1+tRl3U2wtC8E9QZpVGXKt28+G/Mwtg1YDReDfsEPQQWDA/wjRi2nz59BjGNrkGbUvi/zMAaWsHGrQzqEBCVgB3cVxIHac2adRjvL7zgnDFdunSCyz8lkgQx9j+LTS+VgFPFLIQl2IWSCIm5FB1dGkbxn8D+rJlp1OhClCt48bIryDcUvAT5CQz26RMUJCTESdycxo0bIkbBNLmhJiTEi/txvnzR8IzZjWU6khWWM2YBs1HPnTsTRq+4NcKl6P77nxDj39Wrp4pbcMmSFWHo+ise1L8jCnJf3LS/Q86pcTByLYu+ItD2W7hU/2ieeOJh7FtpSmG4P78HwDRPJD6LF89H8LxRiA9THTfZAgAcGwEUduOGXMmMHTsGfZUT9s+evQBuzqthRFwPN8rxcHWuLuXLl09C2WoxtL333vvQ10jpr3fvvpJRm55Mdl38PXx4v7g4NmnSSNrPmFEEXky/palz6BDbGAAvpw75sHnzJjxcrsNDYRuAzvtynMbJV155Ndz75+PGfxoPspooTwG/ouBuvhfbDj+lsn4FKQcScd3fj2t7Mc77MCQmvQYgujFiCd0r7vtr125HHKD/4vp/EMEWW8L26l1cI5vh1fa5nP8CBUpIvKGhQ4chmWhX/M/2wAsun1wvL788CP/LRHg3UQKSgheMuSIVfeaZgeK80KpVG9O//2D5X8TElIDH4CAYzDMJKO20kvHysQf/m/IyjgM08iNm0WCMv0X+gwwT8PLL7yCI5O2oG2cee+xZMSRnwMo33ngVLwF7JbBk3rzRACxFYedTHA4TbyEydXcxeE9VpWIIATJ54A78Ml469sEuiP/xU5jTQIkPVb58OY8UigBKKVQ4oHewUDmTQbmOogARX4okpV27S/HGdAQGabG4CfbEW1t9yZRcvXo1iHxvw+r4xpQEV+kGUKXcKNme7767u7gQnzhxEm9V9XEz/T+xMVm6dJlsN2hQD4DlQ7TLh+i4v+Cm/YUAnVOnEhCsLgnu1ztwzNqCYBPE+D28gZPi4/ehzkG0OQn31BhIXS7Eb3FEAF4mmalZ7vSVCDByGFKSRWbjxk0yNufy2muDkH26DXo6godJS6ytKgLsUfJi8KbZAW+G3bFFXbxDDDzndmkksKPrvkPOm6a/Ooxhs2nTBpHk0HWfH8aE+PbbbwHOnpNs2/fd1wsPiMdEWpQnT9o1ewbQn6DjQDKuyXqSxfyGG240s2Z9DRVqX0RyHo+0ENtxHXQV134CcIJVAu6mTesjNlE1gINDcl0zu3m1avXx8hAFScotkNTx/9cDXnurBfw713giVKhMznkC12MUPOpulWt8wYIl3v/d0qXLEeJgJcbhf+cEQhjcB5BBgG0lHZHoY5v8X9lnrVpVEJixFoBQBDKf9xLV6oQJ41A/SgJMdux4CUBOKUg+j2KeJ1A/Fi8NNQGW+MjyB0LywBNwpGRo79+/P+b3AsDQw3iRKJsmBxgaK4UIB+ydMUSWo8sIJg7Qg2///n0SI2Xv3n0AL3vx5nQEb2K7ccNKxo0rznvzyps3VUzMGxqjGO/btx/1TnkiSFLcDCiQdMILAAhQoqMdIJKcfAaApyEC272EWsdhI7BcxN+OSFuayhf7o6SCVKpUKbwZdgV46oWHwE+4IT6LQHi1ADxaAow0QV9DUCsJ7s9LAV5O4YGxAZKNCMSaoRooCSLy5XBv3AeblBrsDiL90yJh4vbp0/GYdwrAUupfkGCF4zvtoUxC4kWWOfWTUT9Z9n3rMNjf1q1/IbjeQajYLpL6U6Z8DH5ugWrgd+EHJTJUwZ04EQ/x+02okwqapIF+BSEHiuL6vBrg9AZIHZ+B1KM6rp9CsFlph0CIf0LyZnDNDoBKaQCu4euh2rkG0sZmqLMa9Vvi/9AGgP5/sAkZCGnHS3gxaAXAfgwSmL2okyzXfs+e/wJfEqFKnYhrt5jENOL/j0TX7aQk5zoi6CawdigC7fdLMDXWccBGsqTaYEDHOnVaICDiWPPii/+GdOY9xGFqiv/SYMzzOUg2t8A2rAfUwbVRvh//nesAXJoCeI1GnZcBYEYC9DA0AP9jbkqBNLYo7gtHcY1zTgnI5zUPMaIul7U4/+nUe4i7pW4HJwfs1Racs9dZBzEHCkClswBGub/BhuM73KjqyFpOnToG1ctHsHd5CzrvJiJ5GDbsLeT6eRzHeVM6jZtXFdxkE5DDaCrUJw0h+i6Ot7zacqxMmVJ+tpNxg++ON7kiYg/At9AKFUp5QuLbIHIc/jSSQlYE4MkLff8G3Ohbwjj4V2lDEHTddVdDWnIrxNJFBKTQtoAi68qVyyJ+TE/Y5bQRcEJ7A5ZXrVoOD43bsR2DNY2BeH8ZbFZGYv+0vCVv2bIVdjVcF3X4cXhrfhA33C/EXgEFsE2ohfQBb2LrNAxuZwOM7IcK4BGI8FPrNGpUGy7Yj0oMG66vZ09Kc6hWqguePS0AaNGib7CGR7CmdXiAXS2B8FLjwkh1/QpKDsThoT4Wea0+kvMeEcFgZFFQ79yHh3ZnrOioSFO++OJz2JFNx7X2AABEKwDgM1CPfgJJxTjYmRSCncsrpkMHIB2oe5o3bwKg8gWus94ifXGucWPatWuF+DIlJdo17at4TTKfGNNcpN3m/yk/gkG+jjlcCjDdDvtUy/LloTlyff0PLyyjMW5B2NW8jReB9jgWh9AAvXDsY1zbc2Dz9TT+ew2hNj4MkDMJUqKR+F8VhMp1GMIHUJJJyWFxfNLS1Klc0wgYrc/GgRRIYToA0JSSefI/y3kqhQ4HNM5LNp9LjfPin6Hp47zQc+aUSAWiogqjER/gpGj5ZqTcfPlicKM9LQ/gfPnonWPFxZEihWD8guhoW863Knrx8NfftuOxkJjovDXmzx8DAELPI95YWd9SARjN/gDD2rF4c70WoKcrVEy0EQEEiYnBfOlh5NwEbV8ZldNOhjfZ779fBNuDUQA3HRE47l6UHcbboCMxSl0X10Yp0RmMF4df+EVJe67vuKu+cxNOW4ft2P402tJgkm3pbUVeppYTgFFK4/AJP1kijfOSJTadh0rp47zw3BbAfyER6hhHAsJpFChA12BSJEDKdICZx2Bv8jzUQf1QRq+9GLRhRGlHpcOs5M51QsPaSPzfjuN/VQh1jvvU4f/LAgCObaUqvtu4Yo9TxZRHPk7frFNQJI7MA0YqUIAAxPnPjh//iYDtceP+A/utW1B+hDVwj4jHfNz1I/Hf/EDUYqiQhh54oA9eUEqjvv0PsH/O1z3nNE2CZocSWI3zkvZ0qeQlLT9077xxgPYcfJASOLgBBG+gEQJceNOLiMiDbb5p8SZniYaneUVC4twYbfnZfp1+CxQgUCLxZsobvhu4sDwRHkDtYOBaASLsP7F/AjdZdxurw4/IYvkxqJ9iELX5X2m8m2iI6Ixt18V5UBTuv9/U+ryR+9Zxbu5py9lvRuU4pBQCHHD+O5GRRXEtUgJiif8nXqfRULOUgN3XCJGoOJ48rJOI/08JtHHUmwQzzn+B1/kp/K/4y1xYka5rnP8fN0jBboaUAiPbMjhKcJOWoqLyoU+W8b9n/0t5YHdTDga6Y+EV1BzljgqY8+Q9Ik8e54XG+X9Eil1c4cL2P8m+HIoAO/LkKeK5r3Bt/GR1zp5O0vwQBJKXzv8yzaF0O6xr10vw5Nxv0lWT+w3rco22DsGj+z50tvbpewzXEgUv4XrmA2LdvLHw40vucvvW5K7D477lth93W/c22/tr5+7Xbh8R9VHZslVRkJFbZkZ9+Zafho6fOnoCMLps25sU6/HjS77t7XF3/bPV8eUL22dU3/atv8HJAZ5XJvf8HCqeP7DtXFu006pUqS72j0LNchl+ee3xQclrmW0KQT05GaqZWjDQbYLtz0T9Spfn6tVj8Ya/XozL69dv4WmHHyH2weuL4/DFwz6ssSn9s29SPvP55xPExZl7TK1C+y1KG0kE4jfddB2AFVXFLEuBVPJKHsGHQIGAwRJBuHusk4hhdDnKfB9dXONpqNBGitt1jRqNsO+MZ8dAAcjdF4/blwf7MsE6zpw+/HCEuGeXKFEeZZwT1816VI3ZdiwrjHFHwyB5D7YN1Lh9IKUlmLRtpBhflJAaSMM+ghqujdxj2N+kSR9AJbzLY98WAfVeX7ywEeD4e7mSLvQLHHBffcoQ5UCOcsDxpOFNhpddIH84R96g+Gb4T+fL9rwZZkdfucGzKLyBOw9FLEIpoDhQBBK9h+AO/wPsvFrC9qoSHojVYa/yNOw+6A5dEvYif8F490d8fvbMvCAelHvNk08+D/XLJDHsfeKJ58UTb8CAIehrKVQ1zkM2Pv4QAMgG1FklH6cDSmmKwFh+l7d8166tACaORNCpkwL1TVHMpSw+VWEQ/CriwazDdjUpo4SE+Xbi4g7CzX89+vkdzU7CFmYjtjlP/mesOrgojN53SB2nHkELARTVv1Sv8hMPQ90dMPj9P6iTdsGtuiqM/re62rA/rqkIyre7ytmXU75zJ+tznZwLAU4M7HloF9cLDgUbsU8wYcCPjVDNEgTyv8j/RQTcsf+F+FC7sLZYWd/ddz8IAEgwKSImT71IyYV299190Oc9Ala4xttvv83ce+/DAHiFcQ6bCqDs2rUXDO3XoB15rZQRB3zha0b1tFw58I85kJh4XFyP/Usc/nH32kGOcCASnlQJeJPkDV0psDhwRozHaZty7Fi8GJQXLFgRXmfbRNqxYMECRGOejXgtBM8GbsMlYKx9M9zl50sMpUWLvgcwOCLbc+cukEzjZcqUloCKXbtei4CHw5DJeKeJja2J1ikwIK8hhu9btmwRcBQXR8CSgjHmS/DEzp1vwT5BxUmkueiEX0fdM2bMf+G23QlpL25DmUEfXUTS8+yzL4p3UKVKsVAXNRQ7ln37jsKwtzYkM90w3zIIYDcb/X8DGxpHelitWkW4hncTI3nnpYAAIh/WdS0M3XvA7bofcoPNhOv1XACqSACx45AmVUbYhR4CCObNmwdvJM4iWdyvmZCUQGPatOkAJXxhOY3yqjDAvwt93oq+5kOKNAW2asUl1sy4cZ/gWFcJ2eCMb8xXX80BP8bD2+tSdgyw9gruc5TCNJV9536XApDTB3M6jmCAPwh441gMvbB06RyAn4M4h4chfTmFRLRlIXkh76wky9ON/qThgIKXNOzQnZziQOHChSDKjvWIRnNqFO03JzhQqlQB8Q5h35D+y81/5kyDh5wzWmc4tnTpgkcV7reeEDk5MQ3tMx0HEpBw7wWAkdnwJNsF1+PXAAaSYPNxGkavnc3TT/+fhB644IKL0fI0vHUmwAOuEjzPHoL30Rd40N8OL5++ABodEAOoHzx7JuIBngRAs9vjMn0AD+0eeFj3kZEZpbZSpfJm5MgPIS24E1KD3lLeps2FGOcwtgkkSPyldIJqk4IAEKcl4J3zMGZIge2yv2/fIfGMIqhp1KgeXKGfA8jpAZBUDxKM0pBQ3I1YLc9IsDtH9WrEW69x4/oAL1XRtwPKsAGAfQQP/XLcRHyl1+AZVULuN3363Il4NWslRs1jjz0lnopMkkp6/XV6L7XA2p9Gv/S4ug6lyQAs06HaovoqATFnRknE7mbNGsOA/3ozaNAglPOYlaRCnoNAkeSbIxGKB3AsgHPAR2ta8FG+fCWpwwCSNhzDf/7zDsoKwb5uHM7dIdwfz8h/zXE7T9seFZVcHFDw4mJGdm066pHs6i00+mHwN8fFMjTWE66r+OgjA/G3wds9Rf8OFyZPNghBb+DiahA/JFw5kxvrLoYgiB0hcbgbgKQfQMJ+nJdkGJy3QZgBvvWn4IF7qenT52FsJyDfUQNxG2Y5PX7sfYpeR1QNUpXDhyfL+WEZbVUcOiPSAP6Pecwd6JAPYyeei6eqzw8f1DZeEQ+5+7eeR/nz5/c+0PPnzwfw4Ej6ePzGGztDqtQNLRMkBEDVqpWxLeITdifE8Tl/EgEXU3MwMvbHH48DaPsYwflqyjFKfa64giAlQQBTuXIVJFYNI087lEfAR1SU3XdUXKlAhI/MVNDENkzzwfk76q6iIsly7HsI4grhQ2BDqQ7bncZ5SvbwKwIRkS+Q+VJ1Z4kqt65dOwNocc6W//ao/loOKHixnMimX/4xeXEePHjwrD3yz1GsWDFvHV7sCQkJacrYz9GjFMOenYjyixZ1dLKsyb4SExPTlcXFUT98duJNo0iRIt5KvHkxEJVv/3+nL96IeKN098X+Ge4/M+IN0u1hwL748Z3r3+mLc+I83H2x72PHrNdDxrNjNF7GyrBEXvG8+c41K33xBkjjRkv++uJceZ1kRr598Xrgzd09V95Uk5P5dpyeTpyIwbmyOnvn+MKFBrE5DOwd0tZnHD2WffCBwRuzMZddlva4ew9Scty43SW6/fc5kCSxgRjH59tvl+OBfwaB4WIQ5K27GMBWrlwH6pPZCED3ugxRqFBePPxbyjbvPR9++D+oay6EhKICUgeMQnTozQA6d0KC5oAR/jJSs0MpUn7iRDLq3C+BGX/99U8cOiPxYKKj+SixkhdPE8+P7c+W2n37y3L/2ylIITAE8aC+xxreQK0zULMUBhBKbwvCMABHjhyRIfLnL4JI1kDUsClJSUmGi/gtUPlUgmRnEFQ2SxBwcgOOnQbgLo7jedH3K5BEzYC300yUJ0t5pUo18LJVEHY0T0JCdRtABo2XT2I+r0DtdQNUS/Vkn2t+553XAJImQ3I1RcooxapbtzG2j8NF/TVRM1WrVgv7p/GhdJIqIVIEUhg8DgPdZySaccmS5TCfE5Cg9fcY+VO6o5QRBzTOS0ac+Zvlu3btMi+88II8wM7WRZUqVSDyHeytsm7dOgQym4CL/d/eMuqWX3zxRe9+Rhs1atTA23Aqcv/999+hp/08TVsGXXv55Zcz6sJbXrduXfN///d/3v2VK1dCp/uVROG0hWvWrEEekaF2N8Pfhg0bwjDwSe/xH3/8ETfTb/CGjld0D/3222/m7bfftrsZ/jZv3hx/cr5BOrR48WKE4/8Bf/5nbBFuqD8huN1w735GG61atYL+uZ/3MOf066+/ppkr+/4vn9SZEN9y+/Tp4601a9YsPAQ2wpDyEW8Z58pgYplRx44dEXr9Tm+1adOmwbBvZ5q5fv311xLoy1vJzwbws7n66quQRuF279H58ydLtOKuXfugT4MHgjGzZ89CoD/e5NNT7dqd8GZKG4ZUggkFctOk7vvbqlDB4M3W3xGnrE4dA3uBjI/bIy3xjMVfRMnFAf9xXkrgfK6BIeou1CTQOCORbJ3YSdE4ttZzzHjK+WLC1Bj7JPoz1UiMPr19+05ID6JNbGxVeWFiEDkGgqQKpFChwjKL3bt3Y7ukBI7bsOEPuDyXlPF+/XUF/odPIrLv5dj3BfxMC7BLXgwKFiTIT8H+bjHoPXo0HiC/EMYoJHNkIDnfbRrKbtnyKyRKB9A2AmDrAvzy4U9phgVLkWi/H/eR98Ve5P77H8D+X5LniC+TF1zQCnUJrvJDPfOLqGecvtzlP6PcUX0R0NFol3YzAwf+GyDvv7hmCUaOStJKSn4KFyYfz+BDKg613U+eF03O8WKnGOCFhsqxsVU8PHTq07i3dOmSADGO8fOePesx3z0eyZNtz7on8HHWqHFePCx1/Sh4cTEjOzY1SF12cFH7+KccgKDFS0hUDXdaZ5dSErxQ40Hl7OPe7peAydJJUAh4BgwwMKD02wRv+waRVY1p3dr/cZYuXGiQMTjj4/YIBF8ew0pbkvrLsPccy5ec+CG+paGznx68cG20i6DHTKqaw1E1UE1Bch+jCsK3nA9IPthte7tPKQHL+Gvb8KJxyqdM+QyeQn9h3yBZYjeoaGpii8DF3wXFObAPfnjc7rv7Z9+23dp+DgAAIABJREFUjnvb1rcSIM6Pc/Adh21SzKhR/wWIugSSkWbYt+oddxuO7a8vdzn5dAbRej8QlVW5clWwb8ESx3GOY8NF7vbu8fzVt2V2Hdx3r4cSl7T2LgpeXKz2bPKqVVIOKAeCmAOHDhmkWUhdAARjkEKl7kMABk8PZ5/ghZKPihVTj2d166KLDOwrEK0G40EoiDdNpyXjhUH4ByPOswMX1u7Qwfk4LTP+xss53Fb9H1+xwkBMn/5YC0j269dPXw6hHVQA6ctDo4QPPT5Mfck+DH2P+Sv3rWP3+XAl2TZ8KJOSYZPRA7/28ZGA7YyAC+vbdr79uPt313Fvu9tzm2T7cfacbz7wjenblxJPIndenO56dtv2jcNCGZUb2BE9hhoELRa4sIEzDrfSUkb9+qtvy+zYdj9tj7p3dg7Yq+/stfSockA5EFAcYO7IZcsMciThHRESZoISSxdfbGALYffwnsuXwmyi22838DIxsB0wUON9JaLud9/tIqAkm4aQbsqXN1AB+O/x0kv9S2XgBQvbj/RtKO3JyM6mUycDj5P0bVz2mukP5mIJ1SBWPZSL08DQBCtustIMd1lubFu7vuyYT3b29c94kZGE9J/1GtytFbwE9/nT2YcJB2jTDFMmIf4SPNSqZZD4ziC4lSP5OJ+saNvWIEt1LIBTiilX7nyO7IzlD5Bdd52BV0r6uWzebBDLI305S2DuBPVA+mNUS1Fi5UuNG8N/pJBv6fnZp8E1XXId428gVqWw4QDVRo4Hk+stJWxW73+hCl7880VLlQMBwYFffiFIgCAcknDrLEZJwfvvOw/R3JQQlCnj5+keEFxLO4nq1Q0ClaUts3vXXAMZgq8QAQdhow5jZlsr9Xf2bCYUTN3n1rXXGgRWS1v2T/YoKbJA9frrDVxmnd4YaoDA5fBha8vxT0bRtsHEAYKXkiXLeF3Ig2nuOTVXBS85xVntVznwNzhAQ1XaesAJC8HHnAcX7TgoBfAnCfgbQ2RbE+ua6nb5z7bOz1NHBH+uKAPeUXvApIMfX/rjD2NWr05b+tlnxrz1VmqZVeHRsJjnzIr8bTklZTSa9qV3EK+MoImG0dYb/r33nGuATogXXlgSD7CSvs10XzkQlhxQ8JIDp/1sAZtyYDjtMkQ4QCnLJ584hrB0FeYDEYFCvQ+/QFsmXf0pyh42bFigTS3H5uMPRN56a6pUjAMzrhtC/Zjp0x2VFFVctEvy5CUUW54yZWDu6rr7cnvcOAOX/bRTZ2Jzfug2XqnS3zO0Ttuj7oUbBxgHjDGA8uYNLZWT6+8Tbqf0n62XwcKcqIpp+2HQsm3btsHzAq4XZyHGeRk4cKC3xvr16yV+hzv2y19//YXASi9562S0wTgvzz77rPfwH3g9ZPhvxpuxxNgjr9KPNRNinJennnrKW+tnuLEwdok7NsvatWs9QaO81fxuMM7LY4/RYt+hZbAwZb6V/v372yKIx39HkCe8cmZCzZo1Q7bWB721voPRB+PGuOPIrIAbygh/BgzeVs4G47zc57Jo5ZwYb8Y9V/Y9evRon5bpdxnn5Z577vEemAMdD3n9kCvU7JIlS8xHH33krcMNPtAYj27/foNw6Qwx3gEeOz3hmpnqBjxnzgxJ+Na7933etsxLM3HiRO9+RhtX4rX/Vj5VPcS4Pwx46L4uOdfPKDbIhK6FXuSmm27y1voECIvXOQOL2aCAM2bMQLqAL711Mtq44YYbYJeSapjC2EYMjHjbbbd5m/Dancn8A5lQt27dEM/mam+tDxAljwEQb775Zm/Zp9D9MJ9NZtS9e3e4hl/mrTZy5Ei4/1ZAfhvobTz0MVycvvVjEUzpjdsguFevXrBFugSeL07DCRPex7mtCRdyZ64IIWQef3ysBF+zfcNXC5utU3d9tj780JH4lCv3NnjVBBF0O3prMB7RTz8tl316fTEQoD+6//77oT67wHvo9ddfxzwvgts5DHw8NHz4+/BcA4rOhB599FHEAWrkrcV7y6WwpL7QZf3M+E28F2VG/A/XozjKQ0OGDDGdYEnN2E6WOFfGwsqMGKOqFo3BPMQ4Wbx23XNlvKtNmzbZKhn+MnZWbGys9/igQYNgrH47AsjV8Zaxf97vMyPWq0T06SH2fffdd+N8pOozWebE67G1/P8yFlg5j6EZoxfzPv+vf/0LKRMqSwOqmAYMeBahBvbJdbl1awpUnUXxX41BsD7/fQZjqcZ5OYezxiilDNrGgEkM+uYOkGa7IeAYNWpUmgeaPeb+5c3fXmwsZzTV/XiSEdRYYpTX7ZlFBUNlgij3H4PzZIRfd/8EWzt27LBdZ/gbExMDN9qK3uOM5srgTe7+OVcGT8uMCsA4gA8AS3zQ8QHq7otzzcoflpFny7vcTxjhl/2550p7gD179tjhMvxllFn752clzonr9J3r3r17M+zDHmBU3jKuOwJVKeSP71z3ecLS8iHHGCu8D/OZyiFwyZj27YsCiJVOYwx6CD7JjPzrO1deJ5kRVTmlXP7BvB4Y+ZeZfi1xrk7wL1vi/5fJ49zqCrah1wsfMlwrH/ScKz+ZEXPO8GOJa2FfvnN1AobZWv5/2catsuL54lum71ytest/L05paeQ3cEd+5nVEcOY716xEvOb14I7WzFxB+fPHpJnrqVP7cP3Geac0dmxZgPjCEkDQW+jaoBs432NWrNgFtVVBBEkr6j3KudoIzjVrIpd0BpolXkcFERCOeIyXQXz8Tk8k6CLevhISdvuN4ExpEj3cLJUvXwH8STX+2bt3J/hXBOssbKvgfrYLYzCys7fI7wb/w7zvWOJ9itecO9o07ze81jIj3lvcL5W8f/J64L3IEvvn/TAz4v2T92lL7IvXnHuuLON9OjPifZ3XkyUCHl4n7rmyjP/3zKgqjKBs+gQCFc6B/2v3XJkle/r0U2Inx9hMERFlcP0VQRBUIwCGXnau6WQ2ZEAeV/ByDqeFDzi+kfMmSemDP6kIET3fjN0Rb89hCK0aBhyAYMEwcBwfNHRrbto0OBdNSRgBEcGL0j/nAIQZkn7B/VyFUAoh+g1C1/v3pPIddeFCg3uTY8xNNZX7ucrnMPfpfUXvNfbNZzrHs/VYxuwgfIa6n6OUItFw2JZRLca2bMdx2I7gxrcsIyDlO2/dz14O0L6KgpiM3jFpt0VhF94bgpbyBO3Mc2HifBOgaJlv0ZS8+CPmLOJbEEPVk2j/wn2+NbhF3HzjpJrjGro7eIj9Uk3jrseyX2AMcdVVV9lqIl2gmiOzst2I9LVq1ao09SjloCiXagVL/sr4psM0AFe4Yr3zjYWgzV1G1E+V1+WXX267EzEq+eMu2wrdCNUpvmV/QqHvFtf/BTEEAaC7jGkS+OnYMVVUzkjG7JOiaktsx7cXdxn757w7dOhgq8GGIH0Z50Y+tG/f3luPa+Bbbbt27c5axvXzPLnF7+TToUMHkSSvrbct1UPUatG+gZo5Sn63bl0DIHNYkunZiqtxZ+EbfmtXqFqeM0qbfMsofbqYCMhDVMMRZFMdYInXCt803SJ9f2VMkcA3P6rVLPHao12LbxklHHwDtWojXrd05b3gglS1BKWUpBYUG3iI1zz/E26VAP8r7I+qQUvLlzNXT950ZXx7bepCe1RF8u21SZMmtini36Qv40sH/79u9QFTQDAHFdWblpYuXSpSE98ySmUaNGhgq+GcfS/SgfquqHhUZVJS41vGN3+3WoRqRL51u9UPLLvttjK4LupAcmuQTJBh/ZnSoylUFVXF9omDL0J4YkoI3aqRRYsWQgJZCWC4Jq5zJwjg778vFAln8eJAyB5atepbkewmJtYQdSWLqQZjSoBq1arbaihbgLJqKKvmLevXbz62a6A81ltGFSbHpCTA0vz538jcqlRxymi75RIA2mo5/kvN4e+/zwXfG+P6KO8db/nyuXKt5MuHP5+HMirj9Zg3b6qeZdmyOXLdust+/HG2XPN58pS23eEFdzZSBLQE6CyVaRn/V5GRVlSWgpQns+W/GxHhSCcZGVuyFnh7ynyDwIWZYM4mhKaGlHGiXIL+zDsOsBoKXv7GCaGqIyOiCJxvo1YcTjBDEbi9ydt2/tQ4LPNVxxD08OHrJn9lnJNv26yW8WHn25ZlvuocfyqerLb11x9Bne8YLCPochN5l9UyX7WRv7YEAb71slpGUOHblmoJXxVTUtIRXAN7AEIMVI3GIE2REB8utGuxtHNn+rbsj2DITf5UPLyufFU1LPNVbbAO+e8mqpF8r2OW+YrT2dZXLM56BBYENbY+y6h/dxPLfIkqJ3fGXh5nmRWD2/osc4vBWc7/lFvMbsvcKgFb5lY52DJfkTz743/VTeS7zU5sy3luKZ53E8v4X3cTy3zXxmvFt4z13CoE9sF6tWrlk8jHTGf2yy8PAPQZRLIdJmV2HNZLm1zT4L+xx5Nrx9YyeEHZjbUVTWP/snr1HqytuEj6rDZ38+bdAFsl0uSb2rRpN4BaKcwntb9+/XbjoV8WCQdTyyZN2oWHeTmAsNSyiRN34WFewdsfJUZZMC9J7SCbtpg+bcyYnQACNSX6s+127NidAHi10rjOf/DBDrwY1QZYs7WYZHQHXrTqet3UeeSDD3bixa1+mgf+6NE78LLZUKQctjXLrrmmEcCjLTGwn9sBO57Gac7lqFHbEfm6CcCoU4+XGOtdd90Jb4BGAj++7JwLsR++KPn8HdN0QWDjc+mnOR4MO6o2+htniW/4FJXTiMyXeIwGjQOoaFQKWw4QtDBOCF6o5WHB8PyxsY6hbqgwhZl+CVj82X6Fyhpzax3//vcQkT5edFGqVC235hKM49KmjA9v2nXwv0jVFolu8VRxue1wYB4mcZSsSoz1WMZcl24VHgVMfKdwm96wjHVs/2xLg2m8g6UpI87lPCxgsPPAe4q3jGNSzeZu6waG7DurxLEojCSI8UfI7wops8MLf8eDoewcMV0wLCnn50gxsNtjwj0i3xapSnF71LiP220adLqzJFMtwizCtOK3RIlLVrIk0xiMngSWqO6YC3mj2+OF6pisZEmm9bs7SzJVGAsXLjQPPPCA7V7ULvTsyIwo2nZ74lBVQbG8e65UuXz00UeZdSWi+J49e3rrUf1ANUdvJtvxEFUmWfHEaYyIYvQasET1AdU87rmyb3qqZEZUf9DrxdKqVYvN+PF/4cZ1J0THBmtjzJafYLPwhdyk3DdI28b+Uq1DbxxL9ILiW7p7ruQfPXsyo7YIgUsvIUv0LKIUyj1XZruezahrmRBVbm4VJbOMU4rh9vTiXJnxOjOiytGt/ps6dapIXTrb5EvogNcur7nMiCpXt0qPnlNUA7nVrvRaojonM+L/2a2S43VEI0i3+pLeVFRJZUb0bqHawBI9qqha8Z0rVW0ZESVRX301E5KmmDRqMmYnpwrKrSqcNGmSqIcz6suW06PKrTajNx1VcL5zpbo4M+rVq1catRdf5jgnt/qOc6U69mxEKQE94GrWrOGt9v77w6H67ZBGTTdq1GjY6sBYJxOi1w3VYFZCNGbMMKjIr4K0pLa35UcfjciShxBtukqUqOhtN2rUu+J9Vq5cNW/Z6NHDIPkCysmEHnnkUUijynprjRz5tnjF1apVOU2Zr8SVQMkNtFj5iSeeQFZqRyV1+vQZ8dbkPaJChfIiDaSUcMKENyHxp+QTqMk8iY+jhqLzJ6U5dDDDJRbUpODlb5w+eji4b0TuLvgmSrGu2+7Cfdxuu70RWMY+3XYFLGOdzPqxbflrieDKfUNiOfvPSl9u7wq2oxeG246BZayTlb7cHiRsx4eB2/6BZZxrVvpye/Swndubh/sk1slKX27vHbajh4KvioJzzUpfbg8lvkWNGVMFN+wi5j//MV4xdLlyFWBvcimHOiu5vcNYMTY2No0XDss416zMy22HwHZ0p/dV/xD0ZqUvt+0D+yIo9VURca5Z6Yv13ETXfN+4SATQvioZdxu77fbMYxkf6r7nkTYZviop29796/aAYzltXnxVT7RR8VVRufuw2+5rgmUEDPz/uYlzdXs3uY9xm/UJEHkduolgg/9JN9EWh/+jzMj3P0SbDt//EefqO6a/fn3H4//atx3n6stXd1+0TztxIgm2XIfNX39t8h4qXbo41JxxacpKlCiCawJijkzoyJEDaJeqCixYsAReAI7gek3tPyamGOzNIjLpyeAldB+kJRCreKhQoZKQxhyE5CXVfapQoRLoK3MUsG0b1X0Qx3iocOFSMAfYjxcKWEa7yiIjY+xuhr/799MjDKIVEIFKuXKl4V26F9dLIviZLLZKTZtehLAUiVBZ0owhL+yoRuDFpSvUXqk2PBkOECQHVG2UzSeKaqP//e9/aWKsZPMQ2l0AcgACEQkyxjAXrrAvATjT7JsSpTYEMW6pSfb1Ht49UbpGwOk2/g01jmzfvgMvHDEAnHkhXTjlXV5kJNyYkCn7zJlUEOI81KO8dTLeSEK7097DTl8n/JRFeutkvEE371SgEth9HZf/4po1OyDFqpPGnRsKNIQ1GCBxsooVcxniZLzwoDiikpdsPk18Y3Rf8NncvXYXYBygWHfMGMc9FRJreMcE2ARzcDqUMOi1njMMpmTD16g3Z0bKvV5pRJ6YmALwUsRH+uZIO9JK5E5keaJp2/nrK1WaklmnwdRXVFSkDx+d1SUnp0AqEw1pTQQkepmtOHiOK3gJnnOlMw0wDsCEB94BTrwWBBPFTTjAJpjD03HbN+TwUGHXvdv+JuwWb6iGcUtGKJVJlYCcGz+iUZ0SnL/b/txGOz+1uSbyBAZDLqL9UDiRgpdwOtu61mzhAD3laTPLxIl33WUQoyVbug26TujWTp07jWSVspcDdHen5MUdzTV7RwjE3vj0LQa38Q3GiYrs2KXUrVsf5XxgQ8wpBqj4yRJFIJTAPtiaFAAv+WYRGk/3Q4f2wh6yMFyoCfJCY01ZOp0+lRS8+DBEd5UDmXGAeWbg4AFPHYMHd2a1Q/c487Uw1ktWclOFLhdyZmX0oqOnE71nwofyIo/aDBiafi1GscnJtDmJhN1PTXjm3IJYKtXAChq4UoXEhzYfXwQ1tHGhpMZKayhpoWSiMGIqXSv2Hpdc0gn7bGcNdVmHfRXCh33xwzbsk3XscZaTaEjL+iy3fdjx7T7b85MfH0p6WN93nrTb8a1vx8ChNERwwo+tfwZ2LQkwur3JjB07DJ5d9GgjoAtPUvASnuddV/03OECxLLM+M9ccc4SEM3Ah+xjkzjfw299gqzbxwwG6tdsAgH4Oh2ARH9DRSAA7ECEk+sIl+VZ4NToeVFde2RFu03WQRHQqgs41gldmW0gdknH9HUeC2FcQEuBKRCb/DV5+WyQcwB13dIVXY1vz7rv/RpiCPwBe3sR2eUQnXoiAeVsxTgqSInaH11xD8+KL/4cAnbvhlZMXrv8PILnoLISC2IKQFffB3boRyh3j3xdfHIQIyF3hHs4oyw4Ios3OiBHvIPbLQYwbB0P9HqZx4xaIbjsIySA7w2OtqbRPSIg3r732NhKl3gRp7SJ4Ge2Bh9VRhKToCU+05pAKce2+ACZSPIpefvkt6Z9g6MEHOac68ICKhwcR52VBDTbDkCxUDcOl65KVA1nnALw6DRLWImWCkyDPlUUg652EWE1GjvWNHhtiS8y15TBdQlpj0VybynkamA/vJKRM+Q5qo32IZfK4ee+9VxEzaZzp3v1mxKNpDOnLTcj8PgB1fkTdYgA4t5jY2MpIqfCcgIKoqAIABPcgltSvcJfeCLDRHa7aFaT9E088jZQOy3C9FsAnGrFfbkI/P0D9OxeAqBXG6w9A8wCkOxVku3fvRzxZvylxSTF33nmbHHMkK3xsRiFSbyfEmvpd+uzXrzfm8ANivmyHKvku06tXP6Q02YB6RRF3qCtASgOU3y8gi3N46KG+SMz6HervQB1KV9wUJZ5DnGOLFk0xn6cApu7Hi9MUuGrvhAt/TJZCCbh7DMVtlbyE4lnVNWUrBxjaf/p0JzGeK4Zcto6hnSkHwpsDlCLklWS3PXvehvD9TRGs8AtEiN0NcNIfUhiCle6SA2vQoFcQR6kCJC/MBF8egSrvgyRjP+yDikigxC1bdqNeCgID1kAZ8141QLDPMXA9rw7JRS2McxyBMu9F4DpmjY5GfKBaItE4ciROAAqlG3FxlHxZG5sUxE5pinaM00JVEMHLGQTX6wGAmQd9xCCg4ByAld3YNwBUdUWd+uSTz0Hi8yakMscwdjVRAZ45c1LGnD59ltQH/gf5k6CkQJK0CdKbeghuR2mPMYMGce6nVdop3EhVEnp29Uc5oBywHEBwW9wwDN7knF8FLpYz+qscyAkOREGyuQnxkiaZL5B6na6/derUhpSkI0LuIyws7EmmTv0cUpXtsINpClDzIKL6XgFJzW6ocAsBNNRAnbyQhqxAvqx4meCRI0ehbpqGfmoKiImNrYZ61QRcJCaegmHwUYTjhwU+yEmg67hRc9sJxEigEmG++Waq5CpzS0mOHUuC63ER9FcTtjmMpP0zDIQ5bjJA1AxIblZi3Kbmrbdewnxb4NgBgLCiqM8gj2ek/tGjCahPGQJRjP1EYu15ILG5DABugZky5XOs4SPz9NPPQ8W1V+br5OTyB3rQTZgQz4ySckA54MOBb74x0L8bSTD32mtOenmfKmG/y4i94WWXcf5OOZOv0hg6fMhRG3366ST852ogI/RyqHl+RJqI+eb9919DOPv2YEWCRNGOjs5runS5FsClPVQoeczjj/cTacTChXPh/XbSzJw5Gaqg1qgfD5uW/iJ9GTbsNYmOvHDhHPS5ENKanpKS4NlnHwewqIO6SWbw4Gchgant2e7v2SaYiYAUZDNsUAg0+MjkXFNgI/MwQvAfQX/zIOmJFIDTtCkDPSUicnFpjBeD1B43Q/VzEdI85AH4eAgA6ADqfy1RnxcsmA5bnkYwTmaS1HjX5yi2E6Ey+1AkTX/8sQKgbh1epJ6GRKoafp+BVKkyxqEUKHxJI+xm87ln/o3x48fjAhuUzT1rd+eDA0hmjDxExiA9lOnXzwEv52PcYBxj6NCh8oDVJKTZf/aY94y5gtx5rbJ/lNztcd269UgpUABSlSKYiI3DQmkCsiemUaVQMkIj2fwwlH8FKprZkM78ByCH3jaHPHXZh+hg8GvVO9iEbYwDOFhG+xVbh0CEfRbHh9sEAty2Y7nL7ZyoRnJ7LLGc41oZAMegN1IkctsNBEj5DpKijxG+vybKjnrquetz3FOwpXsRtiy7fTKXpyDx72C0rYs6lhypjjNPbhPcpkpfGLaAEXarV6+VxsWeUprBgweb++67D1mtK9rOgv5XwUs2n0IFL9nM0PPc3ZtvGiTINAY5C5WUA8qBHOSAf/BC1+dTUKu4XZIBB2BMkpJyBl42yfDOoSsyyQIeZy/jb/bJ/lLrMzK0k3KA5XYs9ntCxvGfWyt9P2jgl06ePOWZJ8ekpCYj4pj0HEoW6RHXaAEJJUz+5+G/r3ADLxYy+ueGlioHwoQDTCHP+C07dxokMQuTResylQMBwwFKEPLDkPYhuBn3hOfPw+L9Qw8gx3NnC/6X40R940hmKJ2hdIQfeusQIFCqYcv4S7CRF14+98L+ZDm2C+DDcfIg99yriCnzFdQzBC6UxkTCOJgu0v1xD9iHfd9+Is0dd9wNb6FfPMfsmNgV6Q7tVkjOvKKjy2Cb/VrgwnLWsfuOxOTXX1eaH35Ying0d2D8bTDmLYFPfvmcC3BBx2FHluNht3BdsHLAzYFx45wYLosW4XbH+5JSphz4+uuvxajx6quvzrSuVjg3DkyG7pLZtX0zup9bL8FWO8osWfKDeeaZRwFgemDyR2UBNJwtWLAIHug/iP0KbVrWrFkrUhiCkb59eyGrdmUzYcJoxFDZJW3oRXTvvT2RubsygMsKc8stN6LcgoczUNU8ZZo3vxiAqABcnjvj2EnEi7kZMVqeM99++wP6QRRKAA3207fv3YjSW0b6OXo0znz++SdQ6TWGCqYq6pwyEyeOQUb1trBzqYfglWPE1RsHoKa5C3YvJbGVhDQi75lOna5EmyrSxkpXZs/+Bu7SuwGkvjbPP/8UjhHUpEqIsKOUAQdU8pIBY7Q4PDhAGzwGnvvzTwN3SgUu53LWmTywVCl6gShlNwfKlSuHEPCUJIQXFS9eHPYsExGo7mF8npHPvn0H4H1TxAwd+q5Zv34j3KmHSmC5atUawIW5FqQ1jwNYLIWBbTPTsmUzAL4WUMGkmB49+sDwdwWMfEuL4Wuq1ANxdQsVhqt0FTGgPXEiEb+7xHOoTJmyiMlSH/00lX6OH09GvJh7AJZWwT6ntBjavvDCC2bt2vU4MbShiQDYehE2cpsw1wcRCG8p+jom/V55ZVezatVvqFMA8WYqAgjlw7aVvDjqJNrGvPfeCATMqwEwRhsWexybSmflgEpezsoePRjqHJgwwZiPPnLyFBUsGOqrzd71NW/ePHs71N68HGjXrp13O3w2mP34pES/7dTpJiw7TpZeokQJ/J7y5PPJI15D119/jenYsYsc//e/X4Zr9C4Y/lbA72HYrETBniUFgGYlPISOiPREKnq/CBzolTQFXkkdJJDdgAEvmQEDHgdoaQfJy0xPPxHSD4PbJSYeFeDCLgriRsH4MY6hbjSkPsVh35IXQermIat8U4AcygTyAJBUh+SH9c6Ya67phl9rSOyojFAAioebdbJIMFVN5HAkq98KXrLKKa0XUhyAly8iXBq8mRmEGOcNKaSWd14WQ3dOUoECtCVQyk4OMM5IXugvnbf17Ow5kPuKQOj7ODzwi8DLpgImaiVPNGhNkcBxdB8/dixB4rM4UooT8Hg7DV5Fm4EDB6FtIXghNYLU5UbzwQfjzbp1G6GW2SvgwKpqLAfy5SsICUwhsTWhaqpo0WKQ8DBNwAuIz1IDart6pmfPG6Dycfph5F/GZ2Hagh07diPVAMQm/X9GAAAgAElEQVS18FTat2+/hOuvWLGyRPNt2bI9yuNhQ/ex5GbiPLdv/8OULl0KLtMEM+mlK1y3xm6xZyZrv6o2yhqftFaIcYCJFYcMcUL9t20bYos7T8uh++Xzzz9/nkYLr2H69OkD9QkMscKKkhG/5RqRhDguyVSjWFXKaUTYvQY2IxVgO3I5VD6VcOwkPskov1qAwRdffIZ4MK0BMJIQG2YE8gw1hLvy9xKltnr1WE9f+BGi9OU4pC+fmdWr1yP30IuQulyMsqNQ/cxG/qQW0s97742EbUxjxHBZJEHuqlSpiIBxn0jclVdffcm8+uqbpm3bixCZtyJsYT6FtOcn8+yzT+MzGOUXww6G8VhOCQBiDiXHiBg/XkqBR5FB6oPrZQ3Oer0HdeMsHFBX6bMw5+8cUlfpv8O189cGnpYQCxtErTSw8DfmqqvO39ihNlI/BMKhmH/MmDGhtrRcX89VuDBpCP3YY4/l+lxyagLpXaUpkWCadsZSITBxq1fsMQaNo+0Ij/NDYhsnMi69i1KJ25Ta0OuHUkICIXef2JX6VEA4qiTnl15KbqWEux8YyUkfvuP4K7d9cu6UuHC+LPNHXAPniBtUujn6q5++LNxcpd1nKD03tEQ5EGIc+PRTY4YNMwg/bpAXJcQWd56Xw+SBjJehlP0coMoo/JJeEljQLoTkCzLcx/iAJ9k6tg3L7DFuM6icm2x9d5mV7tgy1vEt8+2HdTMax11u++SvBVfuMvc2g86R/M3ROaLfaTmg4CUtP3QvRDmA4JMIN24gEjbwDlDgEqKnWZelHFAOhAkHFLyEyYkO92VSTcTouRMnGrhXhjs3dP3KgdznANUcTL6YGrI/9+cUzDOIiKB6KnxIwUv4nOuwXemKFY5n0b/+pcAlOy8CJmakzYtS9nOACS9DPTFjZGSE2bv3iImPp41LeD14s/+KAQcBBk+dSj6nlAI5MY/z1aeCl/PFaR0nVzgwfbpBgjNj/vtfg+yxuTKFkB00NjY25B+wuXXy6tSpA3fhcrk1/HkZl9cPcwDxoau2HtnB8hS4cVcIG/d6BS+ea4ZvkPMQ+INvO4zy2KFDh3RXE980WYf++IwuGp6BpNKxJWALVq82yEBrkJlXgUtOnKT+/fvnRLfaJzgwnOGeQ5wYwya84tiE+Ak9z8vTOC9g+N69exHQ6AP45JdHjIFK8iYwduzYNJ4UO5GxjzeU2rVrm3r16oknQDjcYM7z9ZhtwyHGl2SHPnLEGHj0KikHlAPKAeVACHFAwQtOZlJSktm2bZtp0aIFAhW1FHCyfv36NKeZkRErVqwoQIeJtBgBk7kx/JGGefbHlfNbxnxFM2c6Brrnd+TwGW3+/PkiiQyfFZ+/lU6BhfnKlSvP34A6UshygCENQvGZpGojXLKRkZHITREtkhZuU4XkhHFOvZ6pl6W6iPEXWIfhpJ1wzql1uMUL5dChQwgN/aHUoxqqTJkyiAJ5fdqKupcjHMBpEY+iX5C5nt5FOB1KOcSBwoULp5FO5tAwYdltsWLFNO1CWJ75f7ZoPqemTp1qDh8+7ElGiTB9uCnGxcV59//ZCIHTWm/tOBcMtEXrfoISEgEIpTFuOgL9w08//YScGT2kmKqml19+GVFamWo9lXihMBtsly5O0jBeTOxPKec5sH27QYZWxNssbHBuDHKV5PyY4TxCq1atwnn5Obr2yy67LEf7185DkwOUsPDa4Yu1lbZwm5Hf+WwKJQqppypByHY8wZhzhW8ujz76qBk1ahQSbT2JB1nGTzJKRgg2JiDFMCUlMTEx5s4775STf/DgQQQ3+14uiFtuucWMHz9eLgwmo2P+EV+yYMXJhOp7VPdzigPffWfM0KHG3H+/QQbXnBpF+3VzgAbsvN59pZTuOrr99zjAlydG2KVEWEk5cC4c8H3W8T/KF3P+hhKFFHjZsGGDuffeewW0ELi89tpr4hF0+eWXCwDJ6EZAINK6dWtkEa0uUhjejC34oBSFx5gGPaM6vhdEqF0kvusLtP0dO4yZMcPAmFqBy/k8Ny+++KKA/dfpi66UrRzo3bu36QCPR38vSNk6kHYW8hwINYmLPWEhBV4oHouPj0d2ztKCMqnnowSG+r+skL+4CrRxKVWqlLe5vzreg7px3jnA1DrTphmzbJlBBtnzPnxYD0hVqgapy5lL4MCBA+IUkDO9a6/KgeDnQEiBl4YNG5rZs2cjTfmrSEfe1gwZMkQkKL/99psY2gb/6dIV+HKAQeiYbJEfpfPLAdpyaWLGnOF5eCZmzBleaq+hyYGQAC/07nnllVfkDFHlQ5sVxmOhES6lL2PGjDEPP/xwaJ7BMF7Vzz872aEZ9h8hepSUA8oB5YByIEw4EBLghTYrnTt3Nhs3bjSPPPKImY7XcWvfwngtzyCN8P2w5LRlYXJuQ3qZwKsSPRfG9aZ795Beqi5OOaAcUA4oB3w4EBLghdKW9u3bS3Rc2qS43Qxp/8J4FEqhxQHaucyda2CIHVrrCqbV0N5FbV5y5ozRkyvUEzPmDOe013DhQEiAF3uyGNr/888/N4899pgtEuCyePFitXnxciT4N77+2glEN3p08K8lmFfAiNP6gM2ZM1itWjVxPMiZ3rVX5UDwcyCkwAvfApcsWZIm2RcD9axYsSLDUP7BfwrDawXwhjdffmnM1VdrssXcPvPPPfdcbk8hZMf/L9OgKykHlAMZciCkwAsD8TC5YoUKFbwLZmTBvn37muuuu06lL16uBOdGYqITz4WRdMMg6W7AnyQbwTPgJxqEE1TeBuFJ0ymfVw6EFHhhILlu3bqlYeCuXbskG7QGjkvDlqDcoVv0Z58ZAy2gUgBwYCEC69BVumPHjgEwm9CawjQYdVWtWtU0bdo0tBamq1EOZBMHQgq80DX6nnvuEcmLfXPh7xtvvCGhtrOJZ9pNLnCAhrnMFI2gyfAay4UJ6JDpOEDvPY3zko4t2VJAJwTGelFSDigH/HMgJMALo+pOnjzZbNu2zUyaNMk88cQTXrDCSJVME+CbQNE/O7Q0EDlANRG9i+rWNfAqC8QZhuecmC5DKWc4cNVVV+VMx9qrciBEOBAS4IXSFdq7MIdDo0aNTJMmTbyZnHnspptu8oKZEDlvYbMMJkL96iuDjN7GfPtt2Cw7KBZqPY1UQpD9p4vOB7ynaUb67Oet9hgaHAgJ8MJTQd3w3XffLXpiunBatRGPMYide59lSsHBgVmzDLJ9GwQeDI75htMsX3rpJYnzwnQcStnLASZkZOwqqsGVlAPKgfQcCAnwkgg3lG/xWs4kjHv27DGbNm1Ks9KSJUuaVq1aKYBJw5XA3/nlF8fOhWF7XLkxA3/iYTLD/fv3a5C6HDrXu3fvNkx8qaQcUA7450BIgBeKVmnvMnjwYMkAXbRoUe9qaVDIbNNKwcUBmCqJuojGuT4OZMG1kBCeLdVF6sWXMyeYxtCqMsoZ3mqvocGBkAAvJUqUMG+++aZIVpiIkUkarRdEKbyyM7eRUnBxgHYuM2ca8+OPwTVvna1yQDmgHFAO5DwHInN+iPMzQlRUlNm6davp0aOH6dChg6G1Pj/MddS1a1eVvpyf05Ato8yfb8z48c4nWzrUTpQDygHlgHIgpDgQEpIXe0YodWEqgGuuucYWmQ2IJ0/XaRVve1kS0BurVztRdG+80ZjatQN6qmE/OXobaWLGnLkMmJhR1d05w1vtNTQ4EFLghQa7zCLds2dPcTPkKUpISDBlypQRq31KYYYOHaqGuwF87f78szH0MGIOI6XA5kDZsmU1MWMOnaLKlSsbqsOVlAPKAf8cCCnwwnDaf/zxh2HQOktUJ8XExJiDBw9KrBd1mbacCbxfpKEyq1YZ5KIKvLnpjNJz4Pnnn09fqCXZwoFRo0Z5X8CypUPtRDkQYhwIKfDCIHVbtmwxr7/+eho1ESUvQ4YMCbFTF1rLSUkxiI7sgJe5c0NrbaG6Gr4YKOUMB9TTKGf4qr2GDgdCCrysW7dOoukuXLjQ5MuXz3uWGKlSKXA5wPD/Y8ca5HIxZurUwJ2nziwtB7777juJas1gakrZy4FZ0J1SdcSI4UrKAeVAeg6EFHgpX768eeCBBwwjf7rVQ7SDGThwYJqy9KzQktziwKefGrNggTGLFuXWDHRc5YByQDmgHAgmDoQUeKFdy3TEkR+L13gGebLEbTeYseX6m7scQBBR8/HHxhw7ZsyXX+buXHT0c+dA27Ztz72RtsgSBzp16pSlelpJORCuHAgp8EJ36J/hrvLOO+9IqgACFrpy8sPAdZmpj+iZxD6ob2ZKen9E98Xjx4+ftY6/dlqWlgMIfGxmzzZmyhQNRJeWM8Gzx0CQ/L+o7Uv2nzPa7/H+ldk9K/tH1h6VA8HBgZACL7URGIR5jRisbgqeioULFzY7d+6Ufd5oM7oRMKbC+vXrzcqVK8X1k+1at24tSR7dp/Ho0aP/396ZgFlRXHv8ICggCiLiAogGd6OJCQiJiQmiYiT6acAoZsWn6FPM40vUaEgU9YnrI7hAXMCoCDyMPheIiuIWRQTcIKCAoqKRTVaVRdToq19BjT2XC8ww3fd29/3X983Mnb7VVad+VV116lR1Hbvyyittn332sSZNmnjv1QceeGA0ij7XkMD48WbDhmmPSw1xpTIay7Oc9aLN8PFXz5nulbvDDz/cevXqFX/iSlEEckAgF8oLismiRYvcYDjMLxexTIQV5dZbb/


